Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Por um escritor misterioso
Descrição
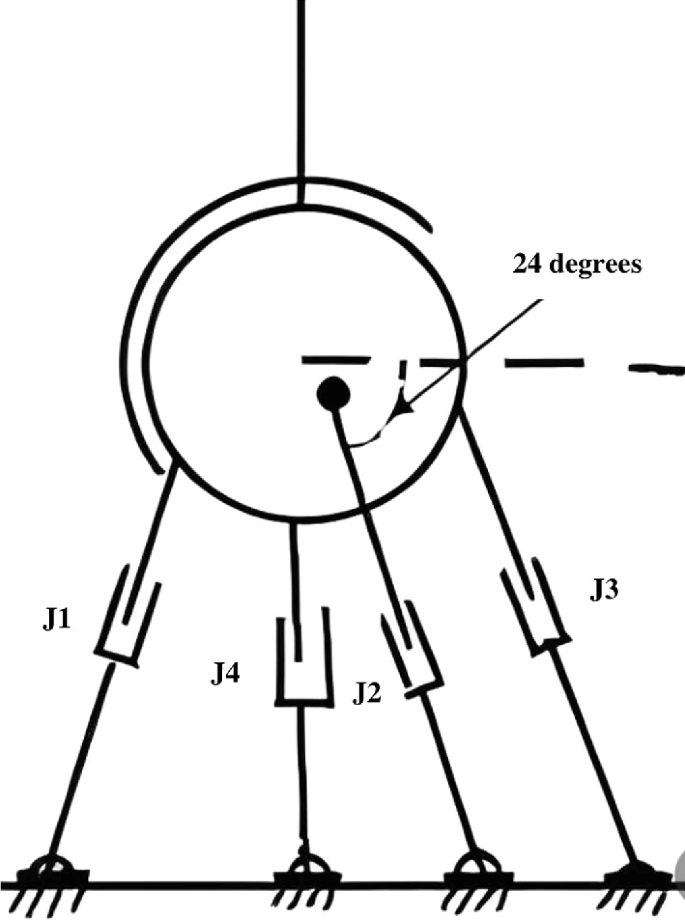
Mechanism design and kinematic analysis of a robotic manipulator driven by joints with two degrees of freedom (DOF)

Full article: Design and analysis of an active 2-DOF lockable joint
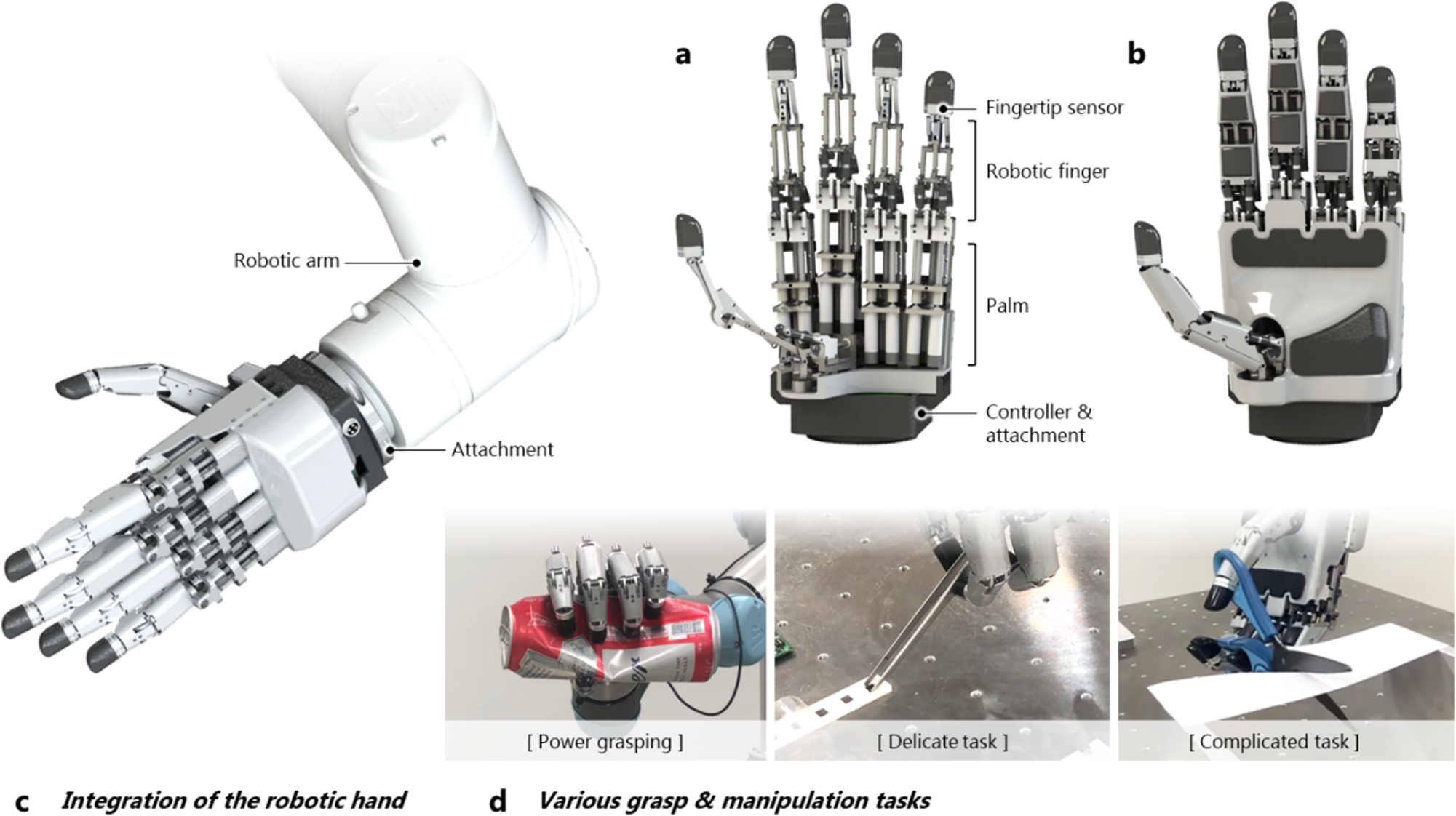
Integrated linkage-driven dexterous anthropomorphic robotic hand

Kinematics analysis of a novel over-constrained three degree-of-freedom spatial parallel manipulator - ScienceDirect
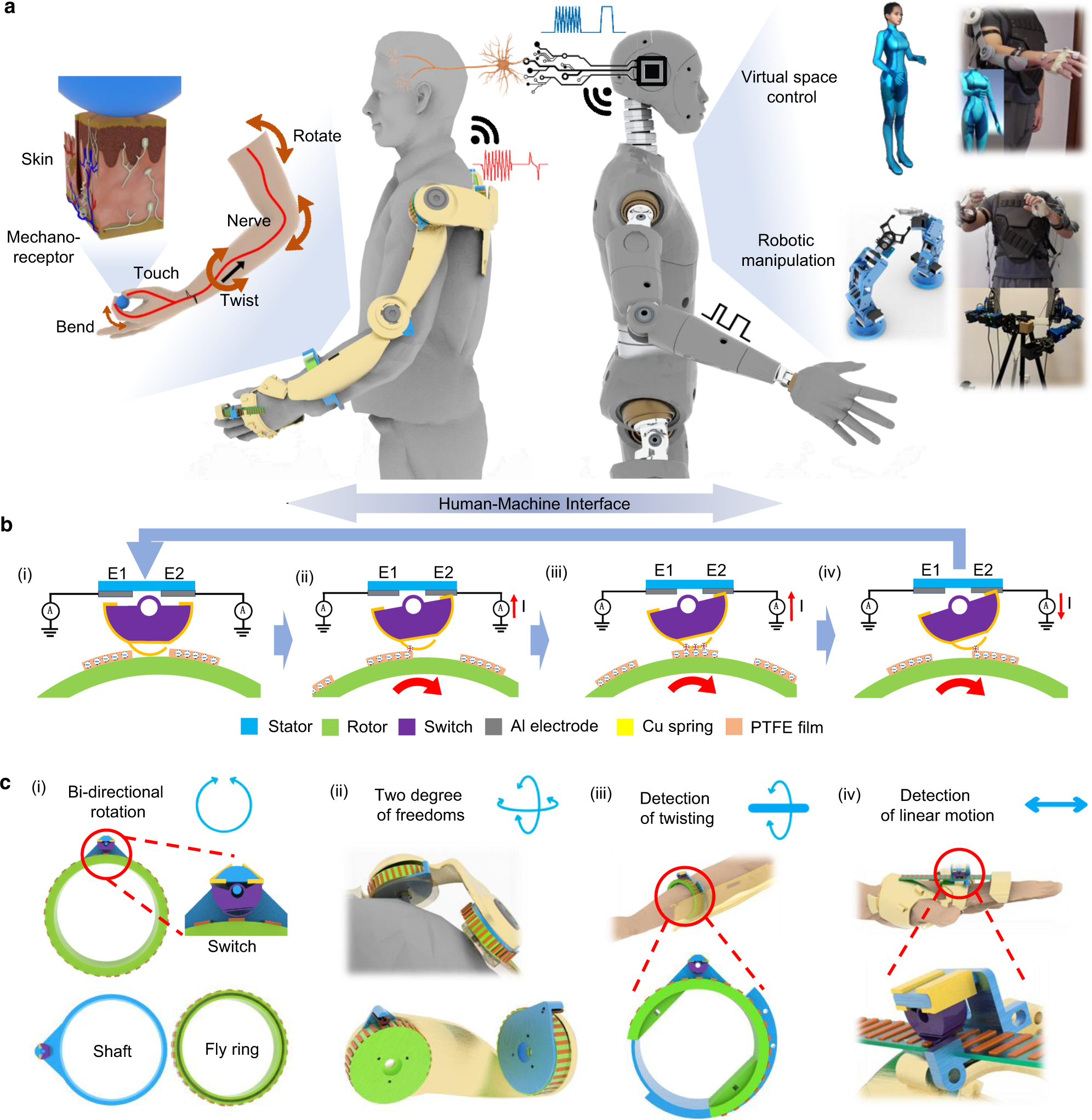
Low cost exoskeleton manipulator using bidirectional triboelectric sensors enhanced multiple degree of freedom sensory system
Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Robotics, Free Full-Text

Design and kinematic analysis of a 3-RRR spherical parallel manipulator reconfigured with four–bar linkages - ScienceDirect

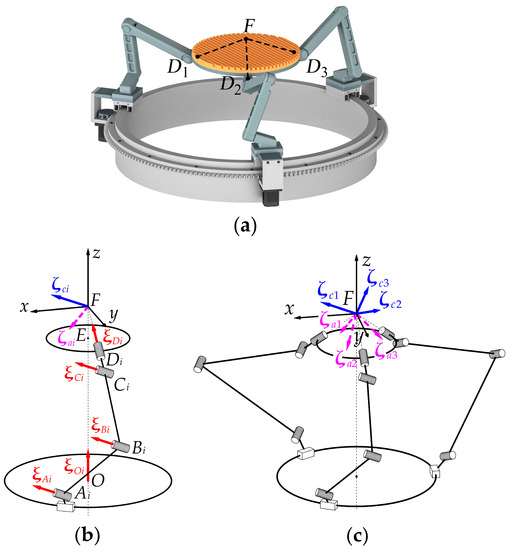
Kinematic model of a spherical parallel manipulator: (a) general model;
Mechanism design and kinematic analysis of a robotic manipulator driven by joints with two degrees of freedom (DOF)

The inverse kinematics of a 7R 6-degree-of-freedom robot with non-spherical wrist - Xuhao Wang, Dawei Zhang, Chen Zhao, 2017
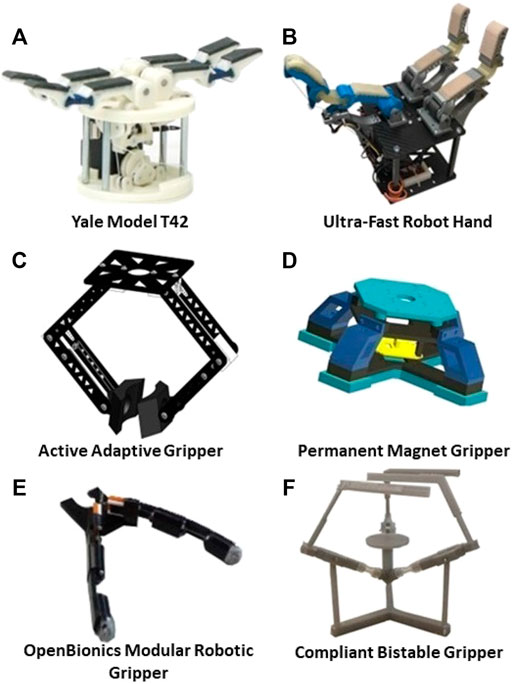
Frontiers On Aerial Robots with Grasping and Perching Capabilities: A Comprehensive Review
Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators

Design and analysis of a tendon-driven snake-arm robot based on a spherical magnets
de
por adulto (o preço varia de acordo com o tamanho do grupo)